■ 질문 LIST
1. SDV 시대, 제어기 개발사의 당면 과제는 무엇인가요?
2. 오토사가 무엇인가요?
3. 오토사는 하나만 적용하면 되는 것 아닌가요?
4. 오토사를 어떻게 적용하나요? 실제 사례가 궁금해요.
5. ASW 및 BSW 개발 시 고려해야 할 부분은 무엇인가요?
6. 사이버보안을 만족시키려면 오토사를 꼭 써야하나요?
7. 오토사 Authoring 툴을 효과적으로 사용하는 방법이 있나요?
8. 자동화했을 때 코드 변경으로 인한 영향이 없나요?
9. 검증은 어떻게 하나요?
■ 영상 Ver.
1. SDV 시대, 제어기 개발사의 당면 과제는 무엇인가요?

Tier의 당면과제
2. 오토사가 무엇인가요?
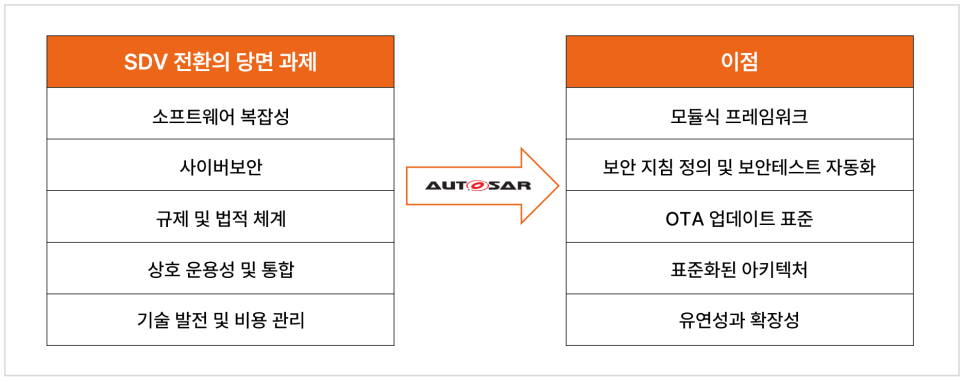
오토사(AUTOSAR) 이점

오토사 계층화구조
3. 오토사는 하나만 적용하면 되는 것 아닌가요?

Classic오토사와 Adaptive오토사
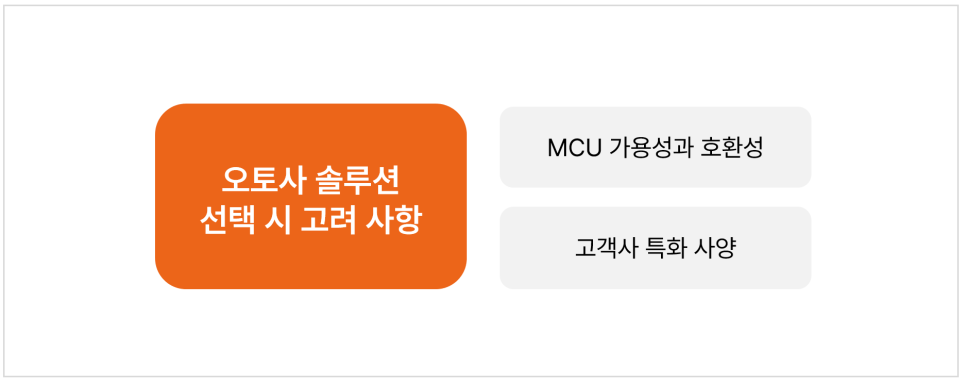
오토사 솔루션 선택 시 고려사항
4. 오토사를 어떻게 적용하나요? 실제 사례가 궁금해요.

페스카로 오토사 플랫폼 적용 사례
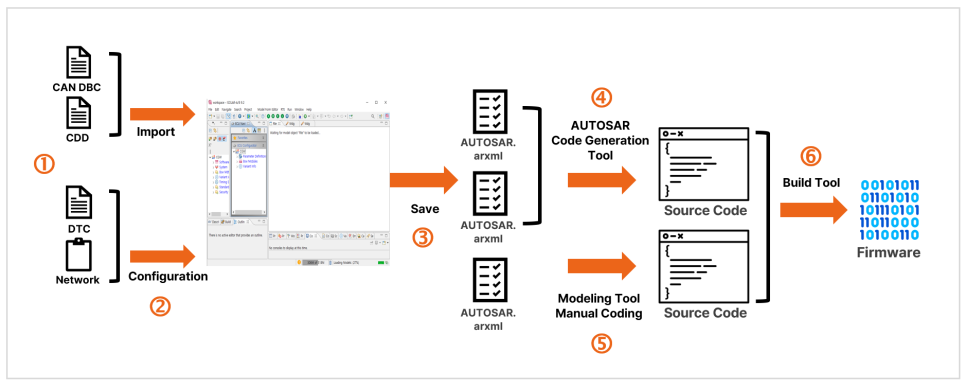
오토사 개발 프로세스
1. 제어기 요구사항과 함께 고객사로부터 CAN DBC 및 진단 CDD, 구현되어야 할 DTC, 네트워크에 관한 정보 등을 전달받습니다.
2. 전달 받은 CAN DBC 및 진단 CDD를 오토사 툴에서 Import하고, 나머지 정보들은 툴에서 configuration 작업을 완료합니다.
3. 저장을 하면 arxml 파일이 생성됩니다. 이 arxml에는 BSW에서 설정한 configuration 정보를 포함하여, ASW의 SW-C에 대한 입출력 및 Runnable의 호출 주기도 포함되어 있습니다.
4. 다음으로 BSW code generation 과정을 통해 BSW의 설정값들이 포함된 arxml을 기반으로 BSW의 코드가 생성됩니다. RTE code generation을 통해 Runnable의 호출 및 ASW의 소프트웨어 컴포넌트 입출력 인터페이스와 관련된 코드가 생성됩니다.
5. ASW 정보가 포함된 arxml을 이용해서 Matlab과 같은 모델링 툴로 로직을 구성하여 어플레이케이션 소스코드를 생성할 수도 있습니다.
6. 마지막으로 Generation된 소스코드를 컴파일러툴로 빌드하면 제어기에 올라가는 펌웨어 이미지가 생성됩니다. 이 이미지를 타겟 즉, 제어기 MCU에 다운로드 하여 동작을 확인할 수 있습니다.
5. ASW 및 BSW 개발 시 고려해야 할 부분은 무엇인가요?
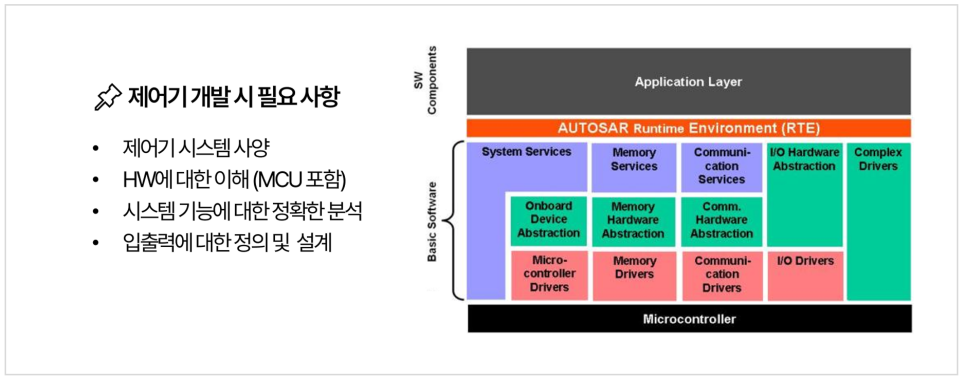
제어기 개발 시 고려사항
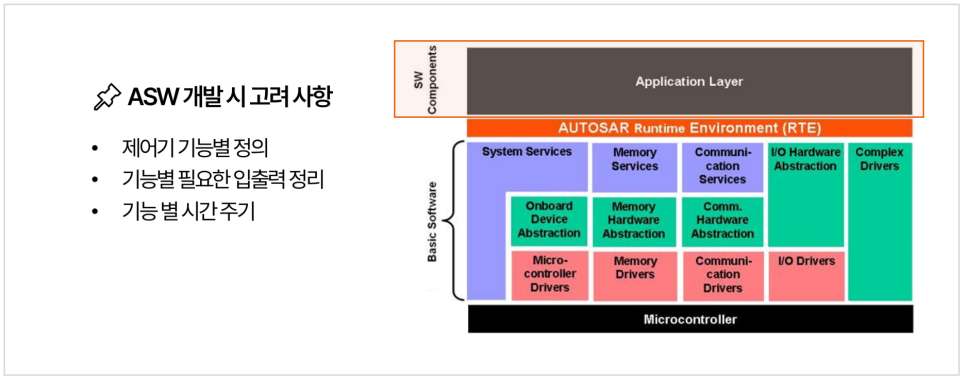
ASW 개발 시 고려사항
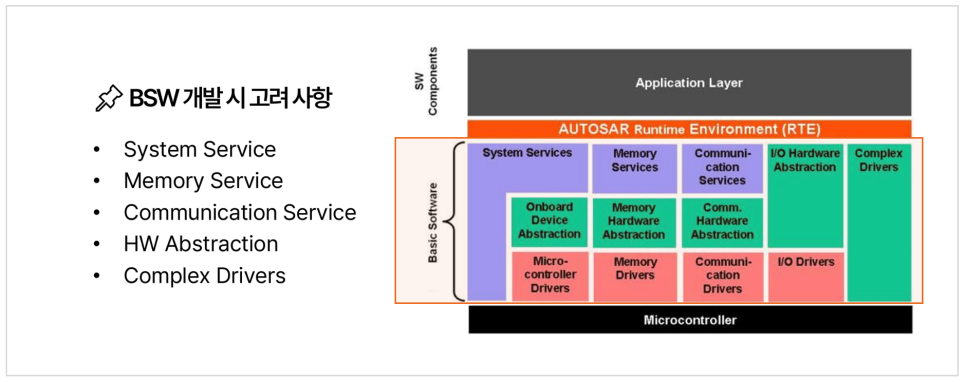
BSW 개발 시 고려사항
- Os 모듈 : 실행 주기와 우선순위를 가지는 각종 Task들, 인터럽트 사용 유무 및 실행될 ISR 연결, Mutual Exclusive를 위한 리소스들을 설정해야 합니다.
- Mcu 모듈 : 시스템 운영에 필요한 기본적인 Clock들을 설정해야 합니다. 제어기 동작 모드 즉 Normal, Sleep, Standby 모드 등을 설정합니다.
- BswM 모듈 : 시스템 운영을 포함하는 모드들과 해당 모드에서 실행되어야 할 Action List들을 설정합니다.
- Gpt(General Purpose Timer) 모듈 : 시스템에서 사용되는 Timer들에 대한 설정을 합니다.
- Watchdog 모듈 : 소프트웨어가 멈추거나 정의해 놓은 시간 주기를 초과하는 경우, 실행 순서를 어기는 경우 등을 설정하여 시스템이 오작동 시 재시작할 수 있도록 합니다.
- Dem 모듈 : 보통 알고 있는 DTC로 제어기 동작 중 오작동을 발견할 경우 NVRAM에 기록해놓고, 클러스터 등에 이 동작 상태를 보고하여 사용자가 인식할 수 있도록 합니다.
6. 사이버보안을 만족시키려면 오토사를 꼭 써야하나요?
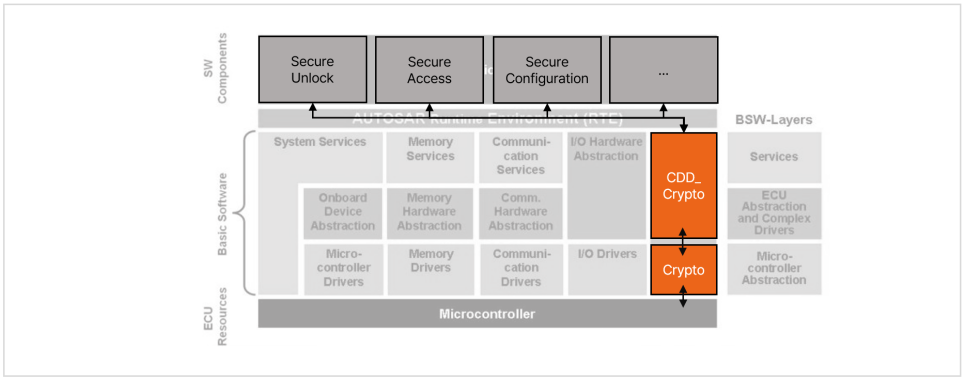
페스카로 사례
7. 오토사 Authoring 툴을 효과적으로 사용하는 방법이 있나요?

오토사(AUTOSAR) 플랫폼 종류
Run-time Environment
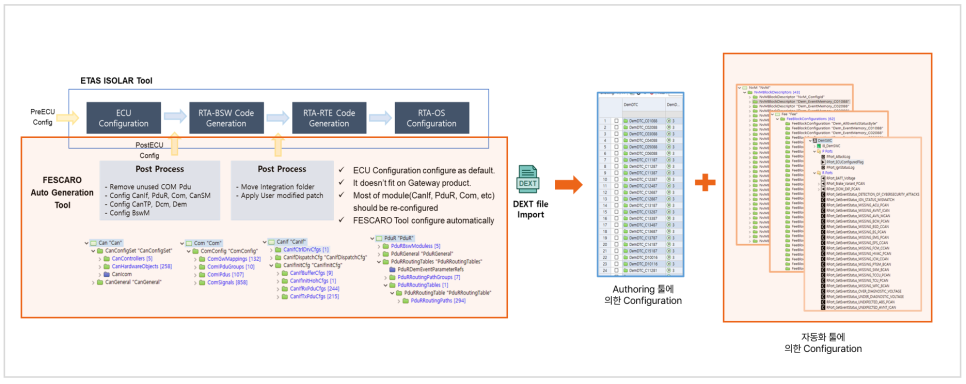
configuration 자동화
8. 자동화했을 때 코드 변경으로 인한 영향이 없나요?
페스카로 사례
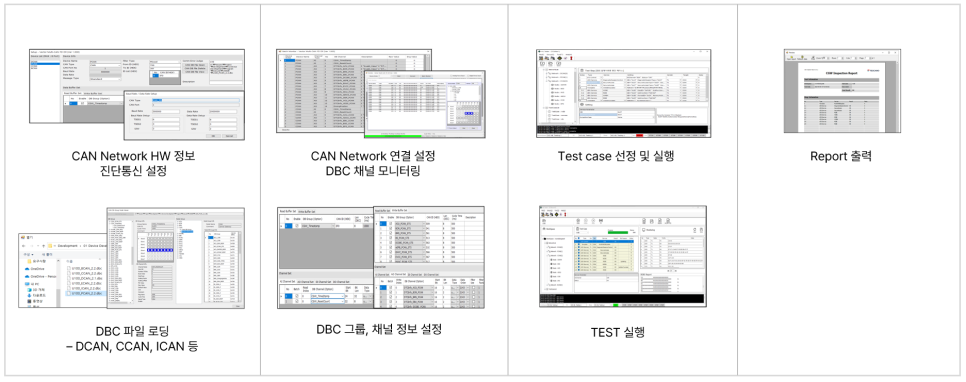
페스카로도
제어기를 개발 시 전문업체와 HIL을 함께 제작하거나 HIL을
직접 만들어 사용하기도 합니다. HIL을 사용하면 Test Case별
필요한 입력 및 요구되는 결과를 설정하여 자동으로 전체 Test Case의 수행 및 수행 결과를 reporting 할 수 있습니다.
9. 검증은 어떻게 하나요?

검증 종류
• C
• 단

페스카로 기능검증
1. 현재 국내 oem이 제공하는 오토사 솔루션을 사용하고 있는데 해외 OEM은 어떻게 준비해야 하나요?
2. 오토사 첫 도입 시 사전에 준비할 사항은 무엇이고 진행 시 유념해야 할 사항이 궁금합니다.
3. 공급 업체들이 오토사 적용 확대 관련 어떤 고민과 애로사항이 있는지 궁금합니다.
4. Classic 오토사가 Adaptive 오토사로 완전히 대체될 수 있을까요?
5. 오토사 재활용에 대한 방법론이 알고 싶습니다. ASW 변경에 따른 BSW 재활용에 대한 설계 방법이 있나요?
ㆍ염* "오토사 플랫폼을 도입했는데 어떤 방향으로 공부할 지 도움이 되었습니다. 오토사를 미리 준비할 수 있는 좋은 기회입니다."
ㆍ홍*문 "웨비나는 더 현장감있게 진행해도 좋을 것 같습니다. 실시간으로 질의응답 시간을 늘리면 좋겠습니다."
오토사 솔루션 도입 시 도움이 중요 체크포인트들을 잘 요약 설명해 주셔서 매우 유익한 시간이었습니다."